LiDAR とは −基礎知識−
光の検出と測距技術
LiDAR (ライダー)とは、「Light Detection And Ranging(光の検出と測距)」または「Light Imaging、Detection And Ranging」(光イメージングの検出と測距)の頭字語で、元々は光(Light)とレーダー(Radar)を組み合わせた造語でした。海外ではレーザーレーダー(Laser Radar)とも呼ばれています。
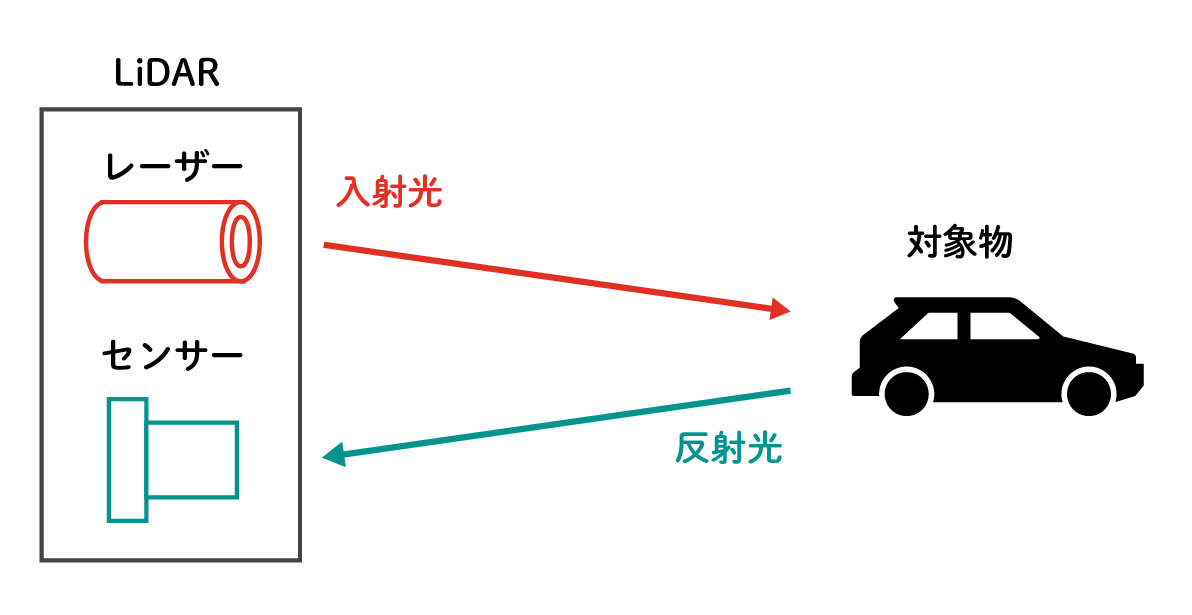
LiDARは、ターゲット(対象物)にレーザー光を照射して、光センサーで反射光を受光することでターゲットまでの距離を測定する測量方法です。
近年では、LiDAR は高解像度の地図を作成するために広く使われています。測地学、地理情報学、考古学、地理学、地震学、林業、大気物理学、レーザーガイダンス、空中レーザー測地図(ALSM)、レーザー高度計など広い分野で使われています。レーザースキャン、3Dスキャンと呼ばれることもあり、地上、空中など様々な場所での動作が可能です。
【LiDAR解説動画1】- 光による検知と測距 LiDAR解説 導入編-
【LiDAR解説動画2】- 光による検知と測距 LiDAR解説 応用編1- 空中LiDARの用途
【LiDAR解説動画3】- 光による検知と測距 LiDAR解説 応用編2- 地上LiDARの用途
【LiDAR解説動画4】- 光による検知と測距 LiDAR解説 応用編3- LiDARの選定
LiDAR の種類(エネルギー別)
高エネルギーLiDAR
高エネルギーLiDARは、通常のLiDARよりも高いエネルギーのレーザーパルスを発射することで、より遠距離や大気中の粒子などを観測できるLiDARシステムです。高出力のレーザーパルスを大気中に発射し、散乱された光を検出器で受信することで、距離や散乱強度などの情報を取得します。
特徴と利点
- 長距離観測: 大気中のエアロゾルや雲などの高高度な粒子を検出できます。
- 高感度: 微弱な反射光を検出できるため、低濃度の物質の検出に優れています。
- 多様な観測: 大気中の温度、湿度、風速などの物理量を測定したり、大気汚染物質の濃度を測定したりすることができます。
用途
- 気象学: 雲の高さや種類、大気中のエアロゾルの分布などを観測し、気象現象の解明や気候変動の研究に貢献します。
- 大気環境: 大気汚染物質の濃度分布を測定し、大気質の評価や大気汚染の原因究明に役立てられます。
- 宇宙科学: 大気中の成分分析や宇宙塵の観測など、宇宙に関する研究にも利用されます。
低エネルギーLiDAR(マイクロパルスLiDAR)
低エネルギーLiDARは、低いエネルギーのレーザーパルスを使用するLiDARシステムで、高い安全性と小型化を実現し、様々な分野で応用が期待される技術です。特に、室内測量やモバイル機器、ドローンなど、人との接触が避けられない環境での利用が注目されています。今後は、測定距離の延伸や悪天候下での性能向上など、さらなる技術開発が期待されます。
特徴と利点
- 高い安全性: 人体への影響を最小限に抑えることができるため、屋内や人通りの多い場所での使用に適しています。航空機への搭載も比較的容易です。
- 小型化: 低エネルギー化により、システム全体を小型化することが可能になり、ドローンやモバイル機器への搭載が容易になります。
- 低コスト: 高出力レーザーを必要としないため、高エネルギーLiDARに比べシステムのコストを低減できます。
- 低ノイズ: 高出力レーザーに比べて、背景ノイズの影響を受けにくく、高精度な測定が可能です。
用途
- 室内測量: 建物の3Dスキャンや室内マッピングなど、高精度な室内空間の計測に利用されます。
- 自動運転: 車の周囲の環境を3Dで把握し、障害物を検出したり、安全な経路を計画したりするために利用されます。
- ドローン: 小型軽量なため、ドローンに搭載し、3Dマッピングやインフラ点検などを行うことができます。
- 文化財調査: 非破壊で文化財の3Dモデルを作成し、保存や修復に役立てることができます。
LiDAR の 測距方式
LiDARの測距方式は主に「ToF方式」「FMCW方式」「三角測距方式」の3種類があります。どの方式が適しているかは、測定したい距離、精度、環境、コストなど、様々な要因によって異なります。
- 長距離測定が必要な場合は、TOF方式が適しています。
- 高精度で高速な測定が必要な場合は、FMCW方式が適しています。
- 小型で高精度な位置測定が必要な場合は、三角測距方式が適しています。
それぞれの方式のメリット・デメリットを理解し、用途に合わせて最適な方式を選択することが重要です。
| 方式 | 原理 | 特徴 | 用途 |
|---|---|---|---|
| ToF方式 | 飛行時間 | シンプル、高速、長距離 | ロボット、3Dスキャニング、自動運転 |
| FMCW方式 | 周波数変調 | 高精度、速度測定、複雑な信号処理 | 高精度な距離測定 |
| 三角測距方式 | 三角形の相似 | 高精度な位置測定、小型化、測定範囲が狭い | 非接触式センサ、ロボットビジョン |
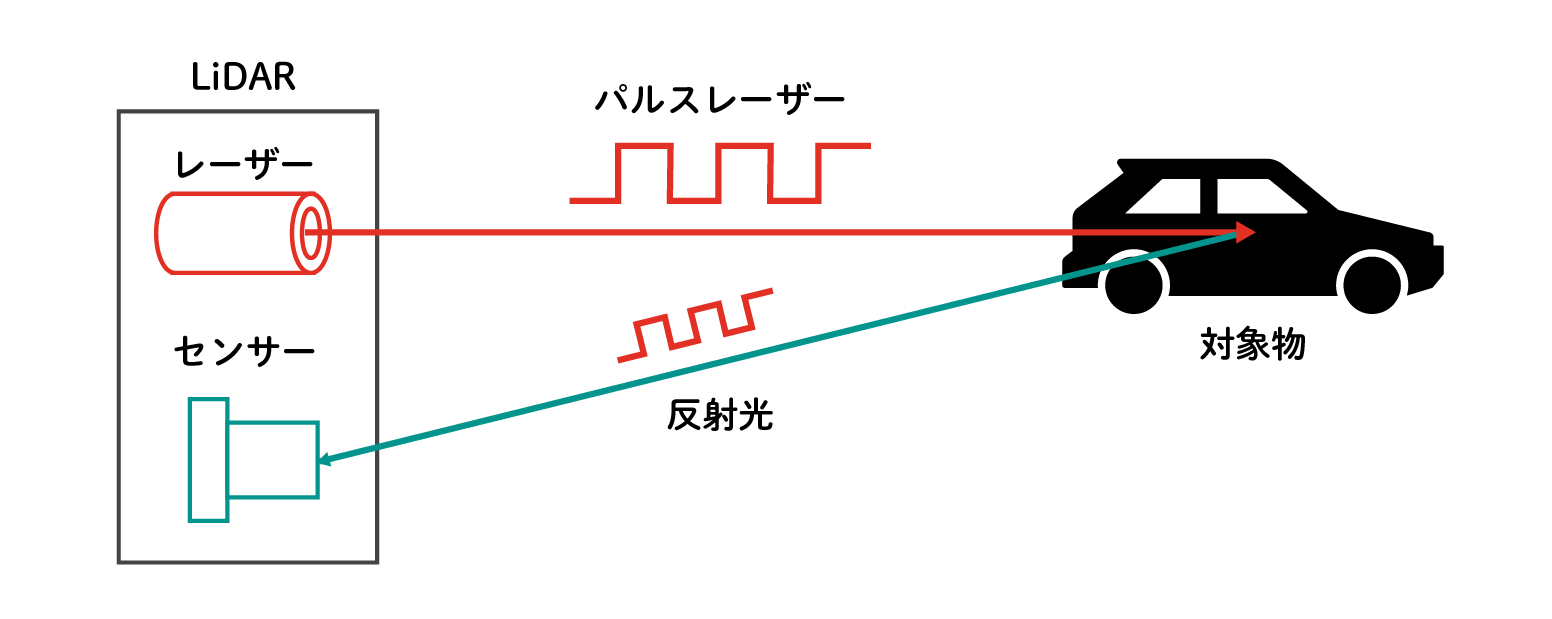
ToF(飛行時間)方式
原理
光源から発せられた光が対象物に当たって反射し、再び光源に戻ってくるまでの時間(飛行時間)を計測することで距離を算出します。dToF (Direct Time of Flight) や iToF (Indirect Time of Flight) といった、バリエーションも存在します。
特徴
- シンプルで高速な計測: 計算が比較的簡単で、高速な測距が可能です。
- 長距離測定: 数十メートル以上の長距離測定にも対応できます。
- 周囲の光の影響を受けやすい: 外光の影響を受けやすく、屋外の明るい環境下での測定は難しい場合があります。
用途
- ロボットの障害物検知
- 3Dスキャニング
- 自動運転車のLiDAR
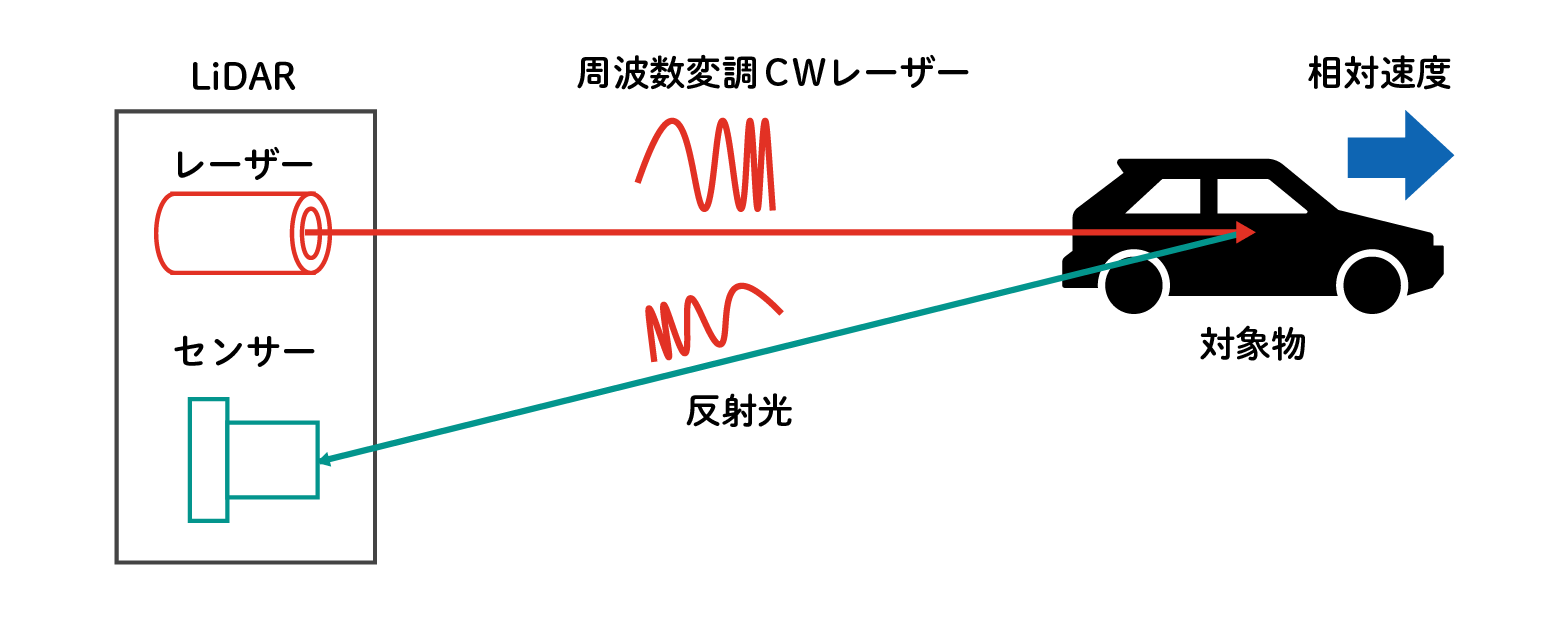
FMCW(周波数変調連続波)方式
原理
連続的に周波数を変化させる光を照射し、反射光との間の周波数のずれ(ドップラー効果)から距離を算出します。
特徴
- 高精度な測定: 高い周波数分解能により、非常に高精度な距離測定が可能です。
- 速度測定: 対象物の相対速度を同時に測定できます。
- 複雑な信号処理: 信号処理が複雑で、実装コストが高くなる傾向があります。
用途
- 高精度の距離測定が必要な産業用機器
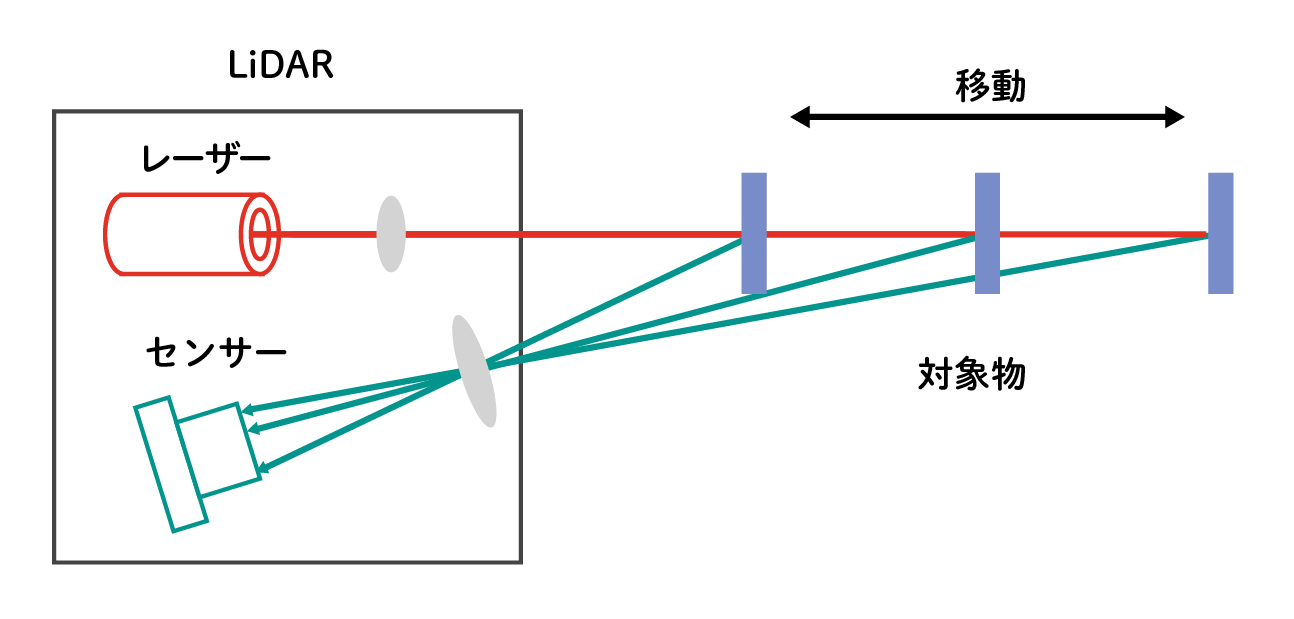
三角測距方式
原理
光源から発せられた光が対象物に当たり、その反射光を別の位置にある受光素子で検出します。光源、対象物、受光素子の位置関係から三角形の相似を利用して距離を算出します。
特徴
- 高精度な位置測定: 相対的な位置を非常に高精度に測定できます。
- 小型化しやすい: 小型化しやすい構造です。
- 測定範囲が限られる: 測定範囲は比較的狭く、長距離測定には不向きです。
用途
- 非接触式の距離センサ
- 自動車の障害物検知
- 産業用ロボットのビジョンシステム
1Dと2Dと3D −測距範囲−
1D LiDAR (シングルポイントLiDAR)
1D LiDARは、対象物にレーザーを照射して、距離を測定します。回転する機構を持たないため 2° など極めて狭い範囲(一点)にのみレーザーを照射することから1D(またはシングルポイント)と呼ばれています。
距離計などに利用されていることが多く、スマートフォンの画面が顔などに近づくとオフになる機能のセンサーとしても利用されています。また、2点間の距離を測ることにより、三角関数などを利用して、建物の高さや幅、樹高なども測ることができます。
2D LiDAR (平面LiDAR)
2D LiDARは、ライン上にレーザーを走査させることにより、2次元(平面)の情報を得ることができます。レーザーを動かす機構として、モジュールの中に回転体を持つタイプと回転体を持たないSolid State(ソリッドステート)式があります。どちらも1度のスキャンで距離と角度がわかるため、周囲の詳細な情報を取得し、障害物の検出や形状を識別する用途でよく利用されています。

3D LiDAR
3D LiDARは、2D LiDARと同じような機構ではありますが、回転体またはSolid State式の機構が2D LiDARより一軸分多く設置されています。そのため、垂直方向と水平方向にレーザーを走査させ、3次元測定をすることが可能です。主に、3D地図の作成、AGV (無人搬送車)、ロボットなどの自立走行や自動走行、障害物検知など情報量を多く取得することが必要な分野に利用されています。

LiDAR と 自動運転
自動運転
近年活発な自動運転技術の開発ですが、様々な技術的課題があります。この技術的課題の解決にもLiDARは使用されています。
自動運転で使用されている主なセンサー技術
- LiDAR: レーザー光を用いて周囲の環境を3次元で高精度に把握します。障害物の形状や距離を正確に測定し、自動運転の安全性に大きく貢献します。
- カメラ: 可視光を用いて周囲の状況を画像として捉えます。信号、標識、歩行者、車両などを認識し、判断材料として活用されます。
- ミリ波レーダー: 電波を用いて、悪天候下でも周囲の車両や障害物を検出できます。特に、LiDARでは捉えにくい速度情報を得るのに有効です。
- 超音波センサー: 近距離の障害物を検出するために使用されます。駐車支援システムなどでも利用されています。
自動運転レベルの中でも運転支援車となるレベル1〜2ではカメラとミリ波レーダーといったセンサーによるサポートが主でしたが、条件付き自動運転車であるレベル3や、ドライバーによる運転を前提としない自動運転車となるレベル4~5の対応になると、高速道路や一般道路を安全に自律走行する機能が必要となります。そのため、センシングの冗長性を担保する必要があるため、カメラやミリ波レーダーに加えて、LiDARが採用されます。
自動運転の目的・効果
- 交通事故の削減
- 地域公共交通の維持・改善(運行の効率化)
- ドライバー不足への対応
- 国際競争力の強化
- 渋滞の緩和・解消
自動運転の技術的課題
- 信号認識
- 複雑な信号(矢印表示など)
- 複数信号(奥・手前など)の同時認識
- 逆光で見えにくくなる信号
- 悪天候で見えにくくなる信号
- 走行空間
- 降雪により見えなくなる白線
- 路上駐車の認識・判断・回避
- 狭い道路での正確な操舵
- 状況の予測・判断
- 交通量の多い交差点での予測と判断
- 不意の飛び出しへの操舵判断
- 障害物の認識
- 傾斜か障害物かの判断
- 様々なサイズの障害物の認識
参考資料:国土交通省 「自動運転の実現に向けた取り組みについて」
自動運転レベル
国土交通省を含むASV推進検討会※1にて定義・合意された内容です。
| レベル | 自動運転レベルの概要 | 運転操作※2の主体 | 対応する車両の名称 |
|---|---|---|---|
| レベル1 |
アクセル・ブレーキ操作またはハンドル操作のどちらかが、部分的に自動化された状態。 <フットフリー> |
運転者 | 運転支援車 |
| レベル2 |
アクセル・ブレーキ操作およびハンドル操作の両方が、部分的に自動化された状態。 <ハンズフリー> |
運転者 | |
| レベル3 |
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。ただし、自動運行装置の作動中、自動運行装置が正常に作動しないおそれがある場合においては、運転操作を促す警報が発せられるので、適切に応答しなければならない。 <アイズフリー> |
自動運行装置 (自動運行装置の作動が困難な場合は運転者) |
条件付自動運転車 (限定領域) |
レベル4 |
特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。 <ドライバーフリー> |
自動運行装置 | 自動運転車 (限定領域) |
レベル5 |
自動運行装置が運転操作の全部を代替する状態。 |
自動運行装置 | 完全自動運転車 |
※1自動運転の実現に必要なASV(先進安全自動車)技術について、開発・実用化の指針を定めることを念頭に具体的な技術の要件等について検討する産学官の有識者・関係者で構成される検討会
※2車両の操縦のために必要な、認知、予測、判断及び操作の行為を行うこと
LiDAR と ミリ波レーダー
前述の通り自動運転には様々な技術が使われておりセンサー技術としてLiDARも使用されています。ここでは同じく自動運転技術として使われているミリ波レーダーとの違いを解説します。
| 特徴 | LiDAR | ミリ波レーダー |
|---|---|---|
| 原理 | レーザー光 | ミリ波 |
| 強み | 高精度な3Dデータ、長距離測定 | 天候に強い、低コスト、速度測定 |
| 弱み | 天候の影響を受けやすい、高コスト | 解像度が低い |
| 主な用途 | 自動運転車の周囲環境認識、3Dマッピング | 自動運転車の衝突回避、車間距離制御 |
ミリ波レーダー
原理
電磁波の一種であるミリ波を照射し、反射波の位相差から距離を測定します。
特徴
- 天候に強い: 雨や霧などの悪天候下でも安定して動作します。
- 低コスト: LiDARに比べて安価な実装が可能です。
- 解像度が低い: LiDARに比べて得られる情報は少なく、物体の形状を詳細に把握することは困難です。
- 速度測定: ドップラー効果を利用して、物体の速度を測定できます。
用途
- 自動運転車の衝突回避
- 車間距離制御
産業向けLiDAR と スマートフォンLiDAR
身近なLiDARと言えばiPhoneなどのスマートフォンです。iPhoneを含む一部スマートフォンにLiDARは搭載されています。ここではスマートフォンのLiDARと産業用LiDARの違いを検証してみました。
iPhoneと産業向けLiDAR『LiGrip』の測定結果 比較動画
比較
今回は「手に持って計測できる」という点で、光響取り扱いの軽量タイプのハンドヘルド型LiDAR「LiGrip O1 Lite」と「iPhone」を比較しました。
| 項目 | 産業向けLiDAR GreenValley International ハンドヘルド型LiDAR LiGrip O1 Lite |
スマートフォンLiDAR iPhone 15 Pro |
|---|---|---|
| LiDARセンサー | Livox Mid-360 | 公開情報なし |
| 計測距離 | 〜70m | 〜5m |
| FOV | 水平 360° × 鉛直 59°(52°〜-7°) | 70° × 70° 光響製ビームプロファイラで測定 |
| 精度 | ±3cm(距離 20mで計測した際) | ±1〜2%程度 近距離であれば誤差は小さくなる |
| 点群数 | 20万点/秒 | 公開情報なし |
| 後処理 | 取得したデータは別途点群解析ソフトで処理 | 取得したデータはLiDARを使用しているアプリにてそのまま処理 |
| 処理時間 | 補正をしなかった場合:すぐ 補正をした場合:30分程度 ※補正:ボアサイトキャリブレーションや空間座標付与など |
約2〜3分程度 |
| 稼働時間(安定性) 10月上旬 気温30℃の屋外で計測時 |
2時間 | 10分 時間経過で本体が熱を持ちアプリが落ちる 冷却し続ければ継続稼働可能 |
取得データ比較
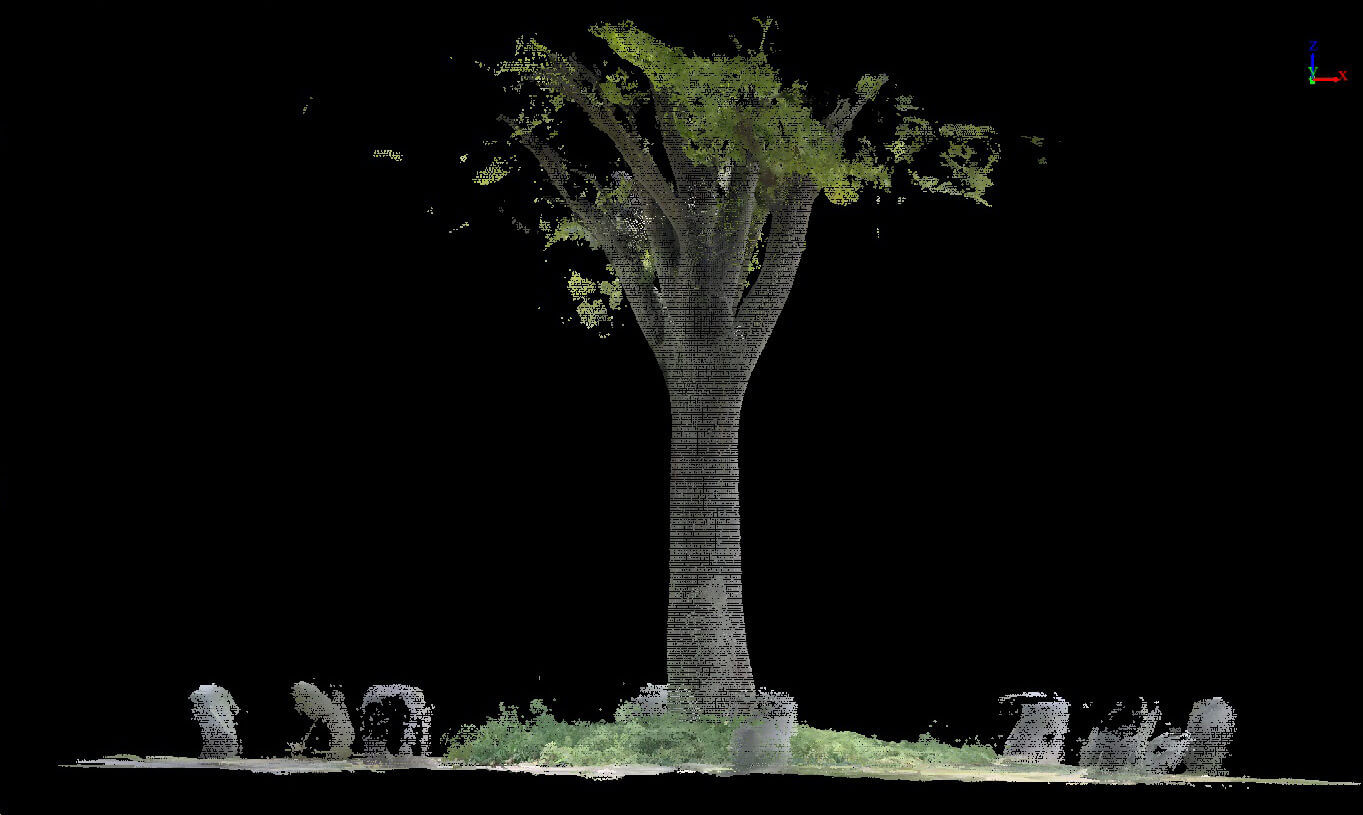
公園にある樹木及びその周辺を計測しました。計測時間は「LiGrip O1 Lite」「iPhone」ともに1分程度です。
産業向けLiDARである「LiGrip O1 Lite」は樹木を含め広い範囲を計測できていました。上部に拡がる葉も計測できているのが特長です。対して「iPhone」は対象である樹木の計測がしっかりとできていました。代わりに計測範囲が狭く、樹木以外の周辺の計測は時間内ではできませんでした。葉も幹上部周辺の一部のみの計測となりました。
LiGrip O1 Lite 点群データ

iPhone 点群データ
産業向けLiDARである「LiGrip O1 Lite」で計測した幹の直径データは”約39cm”(動画撮影時とは別データ)、「iPhone」で計測した直径データは”約30cm”でした。
実計測したところ幹の周囲が”約118cm”となり、計算すると直径は”約37.5cm”となりました。実測に近い(精度が高い)のは産業向けLiDARという結果でした。
LiGrip O1 Lite 直径データ
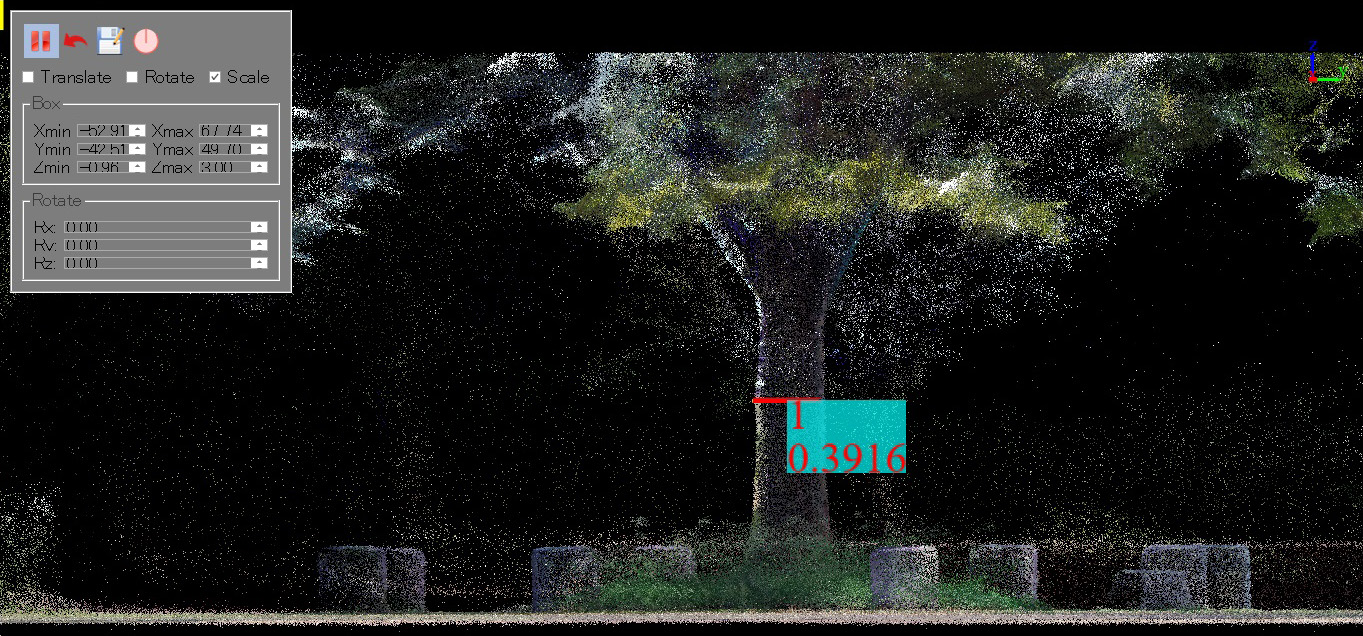 直径データ 約39cm
直径データ 約39cm
iPhone 直径データ
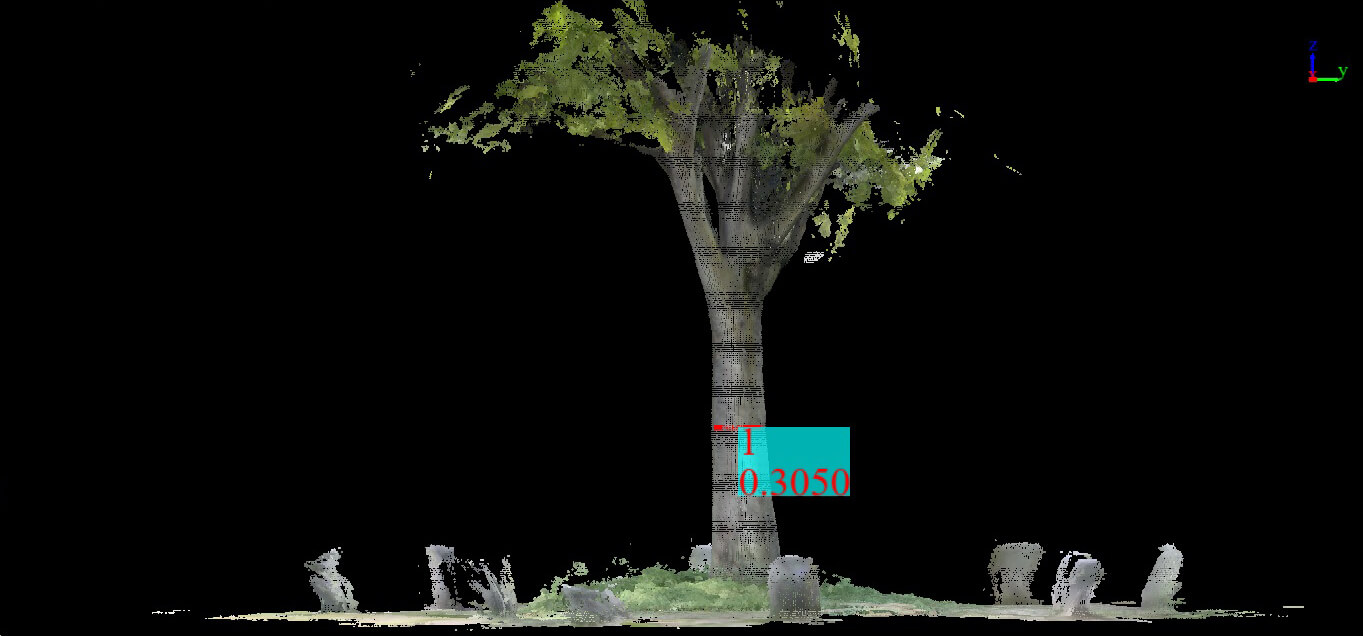 直径データ 約30cm
直径データ 約30cm
LiDAR をより詳しく知る
LiDARの関連ワード
光響取り扱い LiDAR メーカー7社