LiDARをより詳しく知る
1. LiDAR 用のレーザー
航空機搭載型 LiDAR では、一般に1064 nm波長のレーザーを、海底探査システムでは、水中透過性の高い532 nm波長のレーザーを用います。測定時は、適切な発光間隔・発光時間の条件設定が求められます。又、空中トポグラフィックマッピング LiDAR では、1064 nmのダイオード励起YAGレーザーを、水深測定システムでは、532 nmの二重ダイオード励起YAGレーザーを、それぞれ使用します。
2. LiDAR 用のスキャナと光学系
データ収集速度はシステムのデータ走査速度にも影響されます。走査は二次元的に行われ、その方法は様々です。二枚の平面鏡を振動させるもの、多角形の鏡を用いるもの、スキャナが二軸をもつものなどがあります。光学系の性能は角度方向の分解と検出できる距離の限界に影響します。
反射光の分離には穴の開いた鏡を用いる方法とビームスプリッターを用いる方法があります。
3. LiDAR 用の受光器と電子機器
受光器には、様々な物質が用いられます。ケイ素とインジウムガリウム砒素を用いた「ピンフォトダイオード」や「アバランシェフォトダイオード」が一般的ですが、波長によっては、光電子増倍管も使われます。受光器の感度は、LiDARの他部分の設計とバランスを取る必要があります。
4. LiDAR 用のポジショニングとナビゲーション
LiDARを可動型のプラットフォーム(航空機や人工衛星)に搭載する場合、センサーの絶対的な位置と方向を決定する装置が必要で、主にGPSと慣性誘導装置が用いられます。3Dイメージングは走査システムと非走査システムの両方を用いて達成することができます。「3Dゲート表示レーザーレーダー」はパルスレーザーと高速ゲートカメラを適用する非走査レーザー測距システムで、DLP技術を用いたバーチャルビームステアリングの研究が始まっています。
イメージングLiDARは、CMOS 及び ハイブリッドCMOS/CCD製造技術を使用して通常単一チップ上に構築された高速検出器アレイおよび変調感度検出器アレイを使用して実行することも可能です。これらのデバイスでは各ピクセルが復調またはゲート制御などのローカル処理を高速で実行し、アレイをカメラのように読み取ることができるように信号をビデオレートにダウンコンバートします。この技術を使用して、数千のピクセルとチャネルを同時に取得可能です。
高解像度3DLiDARカメラは電子CCDまたはCMOSシャッターでのホモダイン検出を使用します。コヒーレントイメージングLiDARは合成アレイヘテロダイン検出を使用して、スタッキング単一素子受信機をイメージングアレイであるかのように動作させます。
2014年にリンカーン・ラボラトリーは16,384ピクセル以上の新しいイメージング・チップを発表しました。それぞれのピクセルが単一の光子を撮影し、一つの画像で広い領域をキャプチャすることができます。
5.応用の種類
LiDAR(ライダー)には空挺型と地上型に大別できる幅広いアプリケーションがあります。
これらの異なるタイプのアプリケーションでは、データの目的、キャプチャする領域のサイズ、希望する測定範囲、機器のコストなどに基づいてさまざまな仕様のスキャナが必要となります。
5.1.空挺型LiDAR(ライダー)
 空挺型LiDAR(ライダー)(もしくは空挺型レーザースキャン)とは、飛行中の飛行機に取り付けられているレーザースキャナーが地形の3D点群モデルを作成するものです。これは現在、写真測量法に置き換わるデジタル標高モデルを作成するための最も詳細で正確な方法です。
空挺型LiDAR(ライダー)(もしくは空挺型レーザースキャン)とは、飛行中の飛行機に取り付けられているレーザースキャナーが地形の3D点群モデルを作成するものです。これは現在、写真測量法に置き換わるデジタル標高モデルを作成するための最も詳細で正確な方法です。
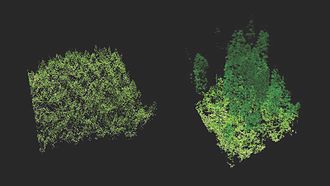
写真測量と比較した時の最も大きな利点がポイントクラウドモデルの植生からの反射をフィルタリングする能力です。これにより木々に隠れている川、道、文化遺産などの地表面を表すデジタル表面モデルを作成できます。
空中LiDAR(ライダー)のカテゴリーの中では、高高度、低高度と用途が区別されていますが、主な違いは高度が高くなると得られるデータの精度と点密度の両方の低下度合です。
空中LiDAR(ライダー)は、浅い水域の深度計モデルを作成するためにも使用できます。現在、ドローンがより小さな領域をスキャンするための経済的な方法としてレーザースキャナーやその他のリモートセンサーを搭載して使用されています(レーザードローン)。無人機のリモートセンシングの可能性は、困難な地形や遠隔地で有人航空機の乗員が受けるであろう危険を排除することができます。
5.2.地上型LiDAR(ライダー)
 LiDAR(ライダー)の地上アプリケーション(地上レーザースキャニングとも言われる)は、地球表面上で動作していれば静止中、移動中ともに対応可能です。静止型地上スキャンは、従来の地形学、モニタリング、文化遺産の資料化、法医学などの調査方法として最も一般的です。
LiDAR(ライダー)の地上アプリケーション(地上レーザースキャニングとも言われる)は、地球表面上で動作していれば静止中、移動中ともに対応可能です。静止型地上スキャンは、従来の地形学、モニタリング、文化遺産の資料化、法医学などの調査方法として最も一般的です。
これらのタイプのスキャナから得られた3D点群はスキャナの場所からスキャンされた領域のデジタル画像を使い、現実的な見た目の3Dモデルを他の技術に対して比較的短い時間で作成することができます。ポイントクラウドの各点にはそのポイントを作成したレーザービームと同じ角度に位置する撮影画像から対応するピクセルの色が与えられます。
モバイルLiDAR(ライダー)(モバイルレーザースキャン)は2つ以上のスキャナが移動車両に取り付けられ経路に沿ってデータを収集するものです。これらのスキャナはほとんどの場合、GNSSレシーバやIMUなど他の種類の機器とペアで使用されます。これは、電力線、正確な橋の高さ、並木などをすべて考慮する必要がある測定において使われます。タキメーターを使用してフィールド内で個別にこれらの測定値を個別に収集する代わりに、点群から3Dモデルを作成することによって収集されたデータの品質によっては必要なすべての測定を行うことができます。
6.応用
LiDAR(ライダー)には以下のアプリケーションに加 えてさまざまなアプリケーションがあり、全米LiDAR(ライダー)・データセット・プログラムで頻繁に言及されています。
えてさまざまなアプリケーションがあり、全米LiDAR(ライダー)・データセット・プログラムで頻繁に言及されています。
6.1. 農業
LiDAR(ライダー)は農家が高価な肥料を、畑のどの区域に使用するかの判断を助けるために使用することができます。
LiDAR(ライダー)は畑の地形図を作成し農地の斜面と日照時間を明らかにすることができます。農業研究事業団の研究者はこの地形情報を前年からの農地収量の結果と比較し、農地を高、中、または低収量ゾーンに分類しました。この技術は農家にとって重要であり、これによって最高の作物収量を達成するために高価な肥料をどの畑に使用するかの判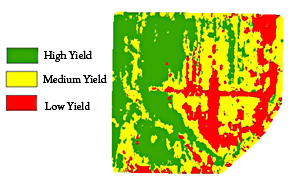 断が正確にできるようになりました。
断が正確にできるようになりました。
作物の健康と地形のマッピング以外のLiDAR(ライダー)の応用に果樹園などでの作物マッピングがあります。LiDAR(ライダー)センサーを装備した車両は枝刈りやその他の維持管理が必要かどうかを判断したり、果物生産の変動を検出したり、自動樹木数を測定したりすることができます。LiDAR(ライダー)は精密農業技術を搭載した農業用GPS信号やドライバーレストラクターがナッツやフルーツ果樹園など張り出した葉によって、部分的または完全にGPSが使用不可の状況で役に立ちます。LiDAR(ライダー)センサーは並木を検出することができるため、GPS信号を再確立できるまでの間、農業用機器を動かすことができます。
6.2. 考古学
LiDAR(ライダー)は考古学の分野で多くの用途と実績があります。例えば現場作業の計画補助、森林キャノピーの下での特性のマッピング、普通では見つけられない広範囲にわたる連続的な特徴を見分ける等です。LiDAR(ライダー)は、植生によって隠されたミクロトポグラフィを明らかにする為の高分解能デジタル標高モデル(DEM)を作成する機能を備えています。
LiDAR(ライダー)由来の製品は地理情報システム(GIS)に容易に組み込めるため、詳細な分析と解釈が可能です。例えば、ボーセジュール砦(カナダ)では森林キャノピーの下に1755年の砦の包囲に関連した未知の考古学的特徴をマッピングすることに成功しています。地上や空中写真では区別できなかった特徴がDEMで作成された様々な角度からの人工照明によってできた山陰を重ね合わせることによって特定されました。
LiDAR(ライダー)を使用すると高分解能のデータセットを迅速かつ比較的安価に生成できるという利点があります。効率性以外に森林のキャノピーを透過する能力はアーレン・チェイスと彼の妻ダイアン・ザイノ・チェイスによるカラコルでの発見のように、現地調査を通じて到達するのが困難、もしくは伝統的な地理空間的方法では区別できない特徴の発見につながっています。返された信号の強度は畑など平坦で植物の生えた地面の下に埋もれた特徴を検出するために使用できます。これは赤外線スペクトルの特徴が植物の成長に影響を及ぼすため、反射される赤外光の量にも同様に影響を及ぼすことによるものです。
LiDAR(ライダー)は2012年にホンジュラスのジャングルにある伝説の街ラ・シウダッド・ブランカを探しているチームによって使用されました。7日間のマッピング期間中彼らは、何百年もの間土地調査を免れた人工構造の証拠を発見しました。
2013年6月、マヘンドラパルヴァタの再発見が発表された別の調査においてLiDAR(ライダー)は地域の密集した森林の天蓋によって覆われ、空中写真では明らかにすることのできなかった南ニューイングランド(米国)の風景、石の壁、建物の土台、放棄された道路、およびその他の特徴を明らかにしました。
2012年5月には、ホンデュラのラモスキティア地方で以前は知られていなかった荒廃した都市を見つけるためにLiDAR(ライダー)が使われました。
6.3. 自律車両

自律型車両は障害物の検出と回避のためにLiDAR(ライダー)を使用し、回転するレーザービームを使用して安全に走行します。
LiDAR(ライダー)からのコストマップまたはポイントクラウド出力から、ロボットのソフトウェアは環境内の潜在的な障害物がどこに存在するか、および潜在的な障害物とロボットとの相対的距離を判断します。
シンガポール-MIT研究技術連盟(SMART)は自律型LiDAR(ライダー)車の技術を積極的に開発しています。
ロボットや自動車の自動化で一般的に使用されるLiDAR(ライダー)センサーを製造する代表企業として、「Sick」と「Hokuyo」があります。


6.4. 生物学および保護
LiDAR(ライダー)は林業において多くの用途があります。
キャノピーの高さ、バイオマスの測定値や葉面積はすべて、空中LiDAR(ライダー)システムを使って調べることができます。同様にLiDAR(ライダー)はエネルギー、鉄道などの多くの業種や運輸局に、より速い測量方法として使用されています。地形図はレクリエーション用のオリエンテーリングマップなどでもLiDAR(ライダー)で容易に作成することができます。
セーブ・ザ・レッドウッド・リーグは、カリフォルニア州北部の海岸にあるレッドウッドを地図にするプロジェクトに取り組んでいます。このプロジェクトの中でLiDAR(ライダー)は研究者が以前にマップしていなかった樹木の高さを測定するだけでなく、レッドウッドの森林の生物多様性を調べることを可能にしました。LiDAR(ライダー)・プロジェクトの北岸同盟で働いているスティーブン・シレットは、この技術により太古からのレッドウッドを保護、保全する将来の取り組みに役立つと主張しています。
6.5. 地質学と土壌学
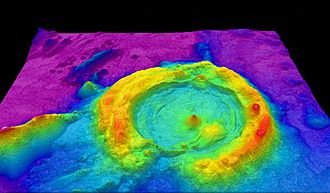
空中艇LiDAR(ライダー)によって生成された高分解能のデジタル高度マップは、地形学(地球表面地形の起源と進化に関係する地球科学の分野)において著しい進歩をもたらしました。
LiDAR(ライダー)は河川テラスや河川敷などの微妙な地形の特徴を検出するだけでなく、植生キャノピーの下の地表標高を測定することで、仰角の空間微分の解消や個別調査の間での標高変化を検出しました。この能力は地形を形成する物理的および化学的プロセスを調べる多くの新規研究を可能にしました。
2005年、モンブランのトゥール・ロンドは高高度での永久凍土の気候変動と変質に起因するとされる岩場での大規模な岩の落下の深刻な増加を監視するためにLiDAR(ライダー)が採用された最初の高山になりました。
地球物理学および地質構造学では航空機ベースのLiDAR(ライダー)とGPSの組み合わせが、障害を検出し隆起を測定するための重要なツールに発展しました。
この2つの技術は樹木を通して地上高度を測定することもできるため、極めて正確な標高モデルを地形モデルのために生成することができます。この組み合わせが用いられた最も有名な例は米国ワシントンでのシアトル断層の位置を見つけるために使用されたことです。この組み合わせはセント・ヘレンズの山岳地帯での隆起を測定するために2004年に起こった隆起の前と後のデータを使用しました。
また空中LiDAR(ライダー)システムは氷河を監視し、わずかな量の成長または減少を検出できます。衛星ベースのシステムであるNASAの「ICESat」には氷河監視のためのLiDAR(ライダー)サブシステムが含まれています。NASAの空中地形マッパーも氷河を監視し、沿岸の変化の解析を行うために広く使用されています。この組み合わせはまた土壌調査の際に土壌科学者によっても使用されています。詳細な地形モデリングにより土壌科学者は土壌の空間的関係におけるパターンを示す、勾配の変化および地形の崩壊を知ることができます。
6.6. 大気リモートセンシングと気象学
当初、ルビーレーザーをベースとした気象学的用途のためのLiDAR(ライダー)はレーザーの発明直後に構築され、レーザー技術の最初の用途を代表するものでした。LiDAR(ライダー)の技術はそれ以来能力が大幅に拡大しており、雲のプロファイリング、風の測定、エアロゾルの研究、様々な大気成分の定量化など、さまざまな測定を行うために使用されています。大気成分の酸素または窒素の吸収を測定することで表面圧力、温室効果ガス排出(二酸化炭素およびメタンガス)、光合成(二酸化炭素)、火災(一酸化炭素)および湿度(水蒸気)を含む有用な情報を取得できます。大気LiDAR(ライダー)は、測定の種類に応じて、地上、空中、衛星のいずれかの種類が使われます。
大気LiDAR(ライダー)のリモートセンシングは、以下の2つの方法で動作します。
- 1.大気からの後方散乱の測定。
- 2.地面または他の硬い表面からの散乱反射(LiDAR(ライダー)が空気中の場合)の測定。
大気からの後方散乱は雲とエアロゾルの測定値が直接検出できます。風や氷晶からの後方散乱により検出された測定値は、検出された波長や偏光を注意深く判別する必要がします。
ドップラーLiDAR(ライダー)(Doppler LiDAR)およびレイリードップラーLiDAR(ライダー)(Rayleigh Doppler Lidar)は、後方散乱光の周波数を測定することによって温度、風速を測定するために使用されます。移動中のガスのドップラー広がりは発生した周波数シフトを介して特性の測定を可能にします。円錐スキャンを実行するNASAのハリLiDAR(ライダー)のようなスキャニングLiDAR(ライダー)は大気風の風速を測定するために使用されてきました。ESAウィンド・ミッションADM-Aeolusには世界的に垂直風のプロファイルを測定するためのドップラーLiDAR(ライダー)システムが装備されています。2008年の夏季オリンピックではヨット競技中に風力場を測定するためにドップラーLiDAR(ライダー)システムが使用されました。ドップラーLiDAR(ライダー)システムは現在、再生可能エネルギー分野で風速、乱気流、風力発電および風力発電のデータを取得するための適用が始まっています。
ドップラーLiDAR(ライダー)システムはパルス波システムと連続波システムの両方が使用されています。パルスシステムは垂直距離分解能を得るために信号タイミングを用いますが、連続波システムは検出器の焦点検出に依存します。イオリクス(eolics)は計算流体力学シミュレーションとドップラーLiDAR(ライダー)測定を使用した風の共同研究と学際研究を示す用語として使用することが提案されています。空中LiDAR(ライダー)の地面反射はLiDAR(ライダー)波長で表面反射率(大気透過率が解っていると仮定して)を測定します。しかし地面反射は通常、大気の吸収測定を行うために使用されます。
「差分吸収LiDAR(ライダー)」(DIAL)測定では2つ以上の近接した間隔(<1 nm)の波長を使用して表面反射率および他の透過損失を除外します。なぜなら、これらの係数は波長に比較的影響を受けないからです。 ガスの適切な吸収ラインに合わせることで大気中のその特定のガスの濃度(混合比)を測るのに、DIAL測定値を使用することができます。これはLiDAR(ライダー)経路全体に沿った積分吸収の尺度であるためで、統合経路差分吸収(IPDA)アプローチと呼ばれています。IPDA Lidar(ライダー)はパルスまたはCWであり、基本的には2つ以上の波長を使用します。IPDA Lidar(ライダー)は二酸化炭素とメタンのリモートセンシングに使用されています。
合成アレイLiDAR(ライダー)はアレイ検出器無しでLiDAR(ライダー)を画像化できます。これはドップラー速度測定、超高速フレームレート(MHz)イメージング、およびコヒーレントLiDAR(ライダー)のイメージングにおけるスペックル低減に使用できます。
6.7. 法執行
LiDAR(ライダー)スピードガンは、スピード制限の実施の目的で車両の速度を測定するために警察によって使用されています。
6.8. 軍事
いくつかの軍事的用途が知られており、AGM-129 ACMステルス・クルーズ・ミサイルのLiDAR(ライダー)ベースの速度測定のように機密情報として扱われているがイメージングにおいて研究が進行中です。高解像度システムは戦車などのターゲットを識別するのに十分な詳細を収集できます。LiDAR(ライダー)の軍事用途の例にはアレテ・アソシエイツによる対地雷戦用の空中レーザー地雷探知システム(ALMDS)が含まれます。
NATO報告書(RTO-TR-SET-098)は潜在的な技術が生物兵器区別のための独立した検出を行える事を評価しました。評価された潜在的な技術は長波赤外線(LWIR)、微分散乱(DISC)、および紫外レーザー誘起蛍光(UV-LIF)であり報告書は次のように結論づけました。
「タスクグループは上記報告書内で議論されたテストされたLiDAR(ライダー)システムの結果に基づいて独立した検出システムの短期(2008-2010)適用のための最善の選択肢がUV LIFであると結論付けた。しかし長期的にはスタンド・オフ・ラマン分光法などの他の技術が生物兵器区別に有用であることが判明する可能性がある。」
レーザー誘起蛍光(LIF)に基づくコンパクトな短距離分光器LiDAR(ライダー)は、スタジアム、地下鉄、空港など、重要な、室内、準密閉、屋外のエアロゾル形態のバイオ脅威に対処できます。このほぼリアルタイムの能力はバイオエアロゾル放出の迅速な検出を可能にすることで乗員を保護し汚染の程度を最小にするための措置の適時実施を可能にします。長距離生物学的独立検出システム(LR-BSDS)は科学兵器攻撃の早期察知を提供するために米国陸軍用に開発されました。これはヘリコプターに搭載される空中艇システムであり、生物および化学物質を含む人工のエアロゾル雲を長距離で検出できます。
6.9. 鉱業
LiDAR(ライダー)はさまざまな作業の為に鉱業で使用されています。
鉱石量の計算は鉱石を採取しているエリアで(毎月の)定期的なスキャンを行い、表面データを前回のスキャンと比較することによって達成されます。
リオ・ティント「未来の鉱山」で使用される小松自律輸送システム(AHS)のようなロボット鉱山用車両の障害検出および回避には、LiDAR(ライダー)センサーを使用することもできます。
6.10. 物理学と天文学
世界中の天文台はLiDAR(ライダー)を使って月に置かれた反射鏡までの距離を測定し、月の位置をmm精度で測定することで一般相対性理論のテストを行うことができます。
火星旋回レーザー高度計であるMOLAは火星周回衛星(NASAの火星探査機)でLiDAR(ライダー)計測器を使用して、この赤い惑星のグローバルトポグラフィ調査を行いました。
2008年9月、NASAのフェニックス・ランダーはLiDAR(ライダー)を火星の大気中の雪を検出するために使用しました。
大気物理学では大気圏中部および上部に存在するカリウム、ナトリウム、分子状の窒素や酸素などの特定の成分の密度を測定するための遠隔検出装置としてLiDAR(ライダー)が使用しています。
これらの測定値は温度を計算するのに使用できます。 LiDAR(ライダー)は風速を測定し、エアロゾル粒子の垂直分布に関する情報を提供するためにも使用できます。
英国オックスフォードシャー、アビングドン近くのJET核融合研究施設ではLiDAR(ライダー)トムソン散乱がプラズマの電子密度と温度プロファイルをはかるために使用されています。
6.11. 岩盤力学
LiDAR(ライダー)は岩石質量分析および勾配変化検出のために岩石力学において広く使用されています。
岩塊のいくつかの重要な地質学的特性はLiDAR(ライダー)によって得られた3D点群から抽出することができます。
これらの特性の一部は下記の通りです。
- 裂け目の向き
- 裂け目の間隔とRQD
- 裂け目の口径
- 裂け目の永続性
- 裂け目の粗さ
- 水の浸入
これらの特性はRMR指数による岩塊の地質学的品質を評価するために使用されています。
さらに既存の方法論を使用して裂け目の方向を抽出することができるため、SMR指数により岩石斜面の地質学的品質を評価することが可能です。
これに加えて異なる時間点で取得された複数の勾配の3D点群を比較することで、その間に岩場に起こった地すべり等の変化を調べることができます。
6.12. ロボット工学
LiDAR(ライダー)の技術は環境の認識と物体の分類のためにロボット工学で使用されています。
LiDAR(ライダー)技術がもたらす、周囲の3次元の地形図、地面との高精度距離、および接近速度をはかる能力は、ロボットの安全な着陸および有人車両を高精度で可能にします。
その他の例については、上記軍事の項を参照ください。
6.13. 宇宙飛行
LiDAR(ライダー)は近距離操作および宇宙船の体制制御に必要な相対速度の測距および軌道要素の計算に利用されています。
LiDAR(ライダー)は宇宙からの大気研究にも使われています。
宇宙船から放射されたレーザー光の短パルスは大気中の小さな粒子に反射し宇宙船のレーザーと並列されている望遠鏡に戻ってきます。
LiDAR(ライダー)のエコーを正確に時間調整し望遠鏡がどれだけのレーザー光を受け取るかを測定することにより、科学者は粒子の位置、分布、性質を正確に測定できます。これは雲滴から工業汚染物質まで、他の手段では検出が困難な大気中の成分を研究するための革新的な新しいツールです。
6.14. 測量

空中艇LiDAR(ライダー)センサーはリモートセンシング分野の企業で使用されています。
DTM(数値地形モデル)やDEM(数値標高モデル)の作成に使用できます。
これは飛行機が1回の飛行で3〜4km幅のエリアを測定できるため、より広い領域の測定に非常に有効です。
森林であってもキャノピーの高さと地上高をより低い垂直飛行であれば50mm以下の垂直精度で測定できます。
これは地理参照された制御ポイント上に設置されたGNSS受信機がデータをWGS(世界測地系)にリンクするため等に必要とされます。
6.15. 交通
LiDAR(ライダー)は鉄道業界では資産管理の一環である資産健全性報告を生成するため、また輸送部門では道路のコンディションを確認するために使用されています。CivilMaps.comはこの分野の最大手です。
LiDAR(ライダー)は自動車のアダプティブ・クルーズ・コントロール(ACC)システムに使用されてきました。
シーメンス(Siemens)やヘラ(Hella)のようなシステムはバンパー等、車両の前部に取り付けられたLiDAR(ライダー)装置を使用して車両間の距離を測定します。
前方の車両が減速するなどして車間距離が縮まるとACCはブレーキをかけて車両を減速させます。
前方の道路が安全だと判断できればACCは運転手によって予め設定された速度まで加速します。
その他の例は上記軍事の項を参照ください。
6.16. ウィンドファームの最適化
LiDAR(ライダー)は風速と風の乱れを正確に測定することで風力発電所からのエネルギー出力を増加させることができます。
実験的なLiDAR(ライダー)システムは風力タービンのナセルに取り付けたり回転スピナーに組み込むことで、水平方向の風、風力タービンの後方の風を測定したりブレードを積極的に調整することで、部品を保護したり電力を増やしたりすることができます。
また、LiDAR(ライダー)は風力タービンの出力カーブを測定することによってインシデント風資源を特徴付け、風力タービンの性能を検証し、風力タービンの発電量の確認をすることができます。
6.17. 太陽光発電配備の最適化
LiDAR(ライダー)は都市レベルでの太陽光発電システムを最適化する計画立案者や開発者を助けるために、設置に適切な屋根を決定し、遮光ロスをはかる事に使用できます。
最近の研究は建物の正面の太陽電位推定と植生や周辺の地形の影響を考慮してより詳細な遮光ロスを組み込むことに焦点を当てています。
6.18. ビデオゲーム
レーシングゲーム「iRacing」ではスキャンされたレーストラックを特徴とし、ゲーム内の3Dマッピング環境でミリメートル精度の凹凸が再現されています。
「Black Myth: Wukong」でもLiDARによる3Dマッピングが使われています。実際の地形を計測しゲーム中のマップで使用しています。
6.19. その他
Radioheadの曲「House of Cards」は初のリアルタイム3Dレーザースキャンを使用したミュージックビデオであるとされています。
構造化された光走査も使用されているため全データがLiDAR(ライダー)によって得られたものではありません。
7.代替技術
最近のSFM(Structure From Motion)技術の発展により視覚およびIR写真から抽出されたデータに基づいて3D画像および地図を作製することが可能になりました。
標高または3Dデータはマッピングされた領域上の複数の平行パスを使用して抽出され、通常は特別に選択され較正されたデジタルカメラである1つのセンサーからの視覚光画像および3D構造の両方を作成します。
8.参考
参考文献
- https://en.wikipedia.org/wiki/Lidar
- https://ja.wikipedia.org/wiki/LIDAR
参照ページ
光響取り扱い LiDARメーカー7社





LiDAR(ライダー)の評価装置
LiDAR コンテンツ一覧